移动机器人因其能够在复杂或危险的工作环境中替代人类而受到了越来越多的关注。一般而言,这类机器人可以分为三类:轮式、履带式和足式机器人。
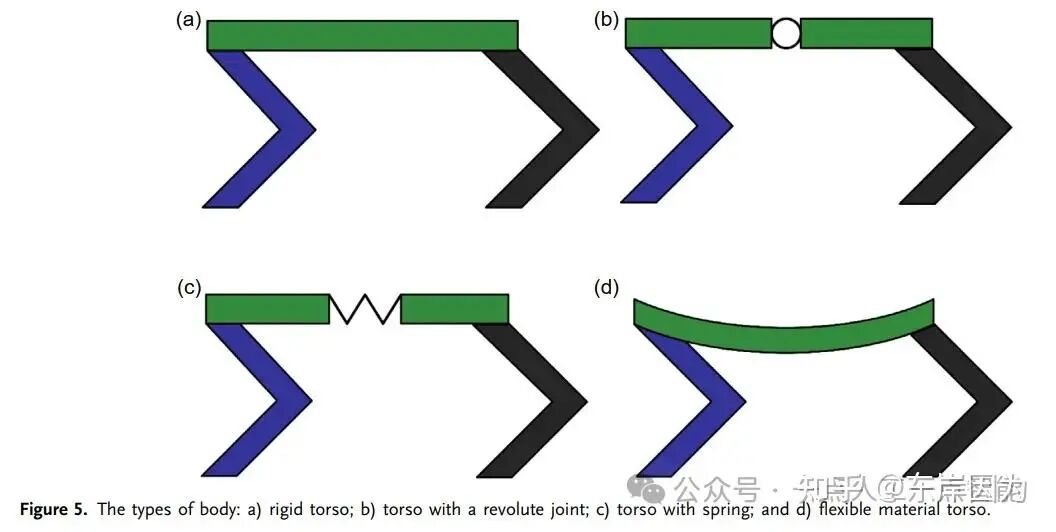
轮式和履带式机器人在平坦地面上表现出色,具有平稳快速的移动能力和相对简单的控制系统。然而,在穿越软质地表或不平地形时,它们的效率会显著下降,甚至可能无法移动。相比之下,足式机器人凭借其离散的接触点展现了出色的适应性,能够穿越复杂的地形,如障碍物、沼泽、沙漠和不平整的表面,同时保持身体稳定。此外,四足机器人还具备无限制的横向移动能力,实现全方位运动。足式机器人的研究主要集中在双足、四足和六足机器人上,对单足和八足机器人的关注较少。选择合适的足数对于确保机器人高效移动和稳定性能至关重要[3]。与双足机器人相比,四足机器人拥有更强的承载能力和稳定性。而且,相较于六足和八足机器人,四足机器人的结构和控制系统更为简单。四足机器人凭借其独特的地面接触方式和对复杂地形的出色适应能力,已成为自动化与机器人工程技术研究的焦点。近年来,在结构设计、运动规划和平衡控制等关键方面,四足机器人已取得重要进展。近年来,许多研究团队专注于四足机器人的动态步态、运动稳定性、平衡能力和高负载特性等方面的研究,旨在提高其动态稳定性、运动速度和运输能力四足机器人的机身作为主要支撑结构,类似于四足动物的躯干部分。它通常选用铝合金和碳纤维等材料构建。身结构可以分为刚性和柔性两大部分。腿部拓扑结构
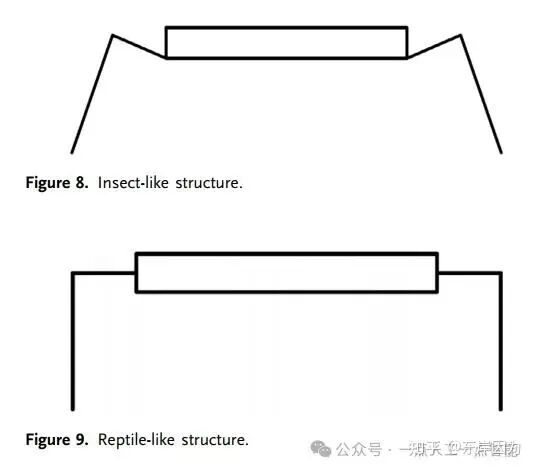
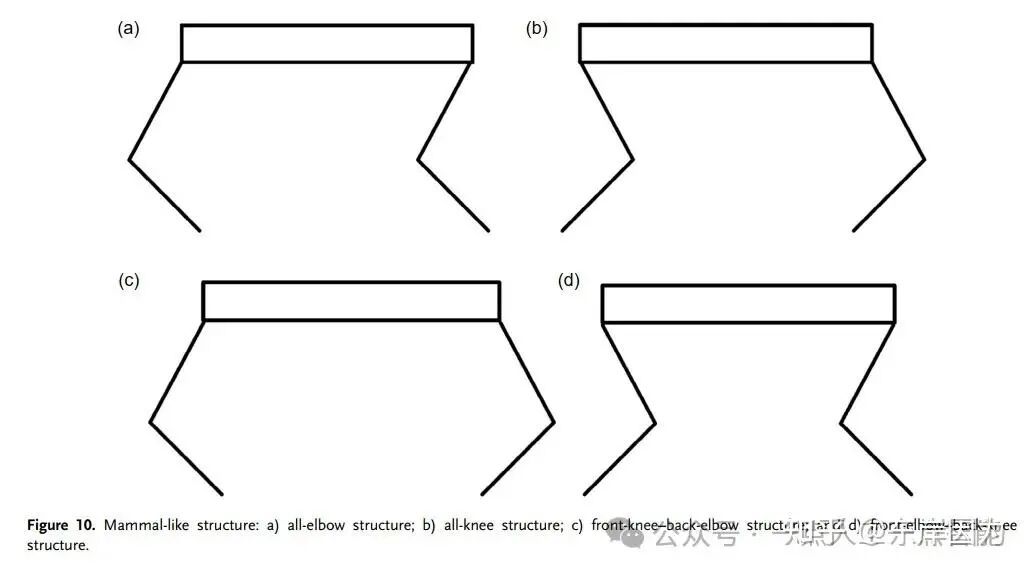
四足机器人的关节可以分为两类:膝关节和肘关节。四足机器人的腿部拓扑结构大致可分为三种类型:昆虫型、爬行类型和哺乳动物型全肘关节型设计适用于有低矮垂直障碍物或连续楼梯的室内或城市环境,因此被广泛应用于多数中小型电动四足机器人。全膝关节型配置尽管与全肘关节型对应,但在实际应用中较少见。前膝后肘型配置采用的是完全对称的设计,其中前腿的膝关节更适合攀爬垂直障碍物,避免与障碍物接触,适合户外环境[46]。而前肘后膝型配置以其对称结构有效减少了由于关节控制误差导致的躯干重心波动,并且紧凑的结构使得传感器可以更方便地安装在脚上,用于检测地面障碍物。脚部结构
四足机器人的脚部设计通常包括圆柱形脚(包括半圆柱形脚)[47]和球形脚(包括半球形脚)[48]。然而,当遇到障碍物、斜坡或不平地形时,配备平底或球形脚的四足机器人可能会面临跌倒或难以穿越的风险。此外,传统脚部结构往往缺乏能够提供环境信息及脚与周围交互信息的传感系统,进一步限制了四足机器人在复杂环境中的适应性。四足机器人的脚部通常由橡胶和海绵等弹性材料制成,但传统材料很难同时满足高摩擦系数、强减震性和坚固柔韧性等需求。因此,在四足机器人脚部设计中应用新材料将提升其环境适应能力。使用特殊材料,如仿生壁虎脚材料,可以使四足机器人更好地应对更复杂的环境。四足机器人的运动规划涉及选择合适的地面接触点和规划腿部轨迹,以防止机器人倾覆。通过生成适当的腿部轨迹,可以最小化机器人与地面之间的冲击力。
步态生成方法
四足机器人的运动规划包括步态生成方法和步态执行。常用的步态生成方法有:中枢模式发生器(CPG)、弹簧加载倒立摆模型(SLIP)、零力矩点(ZMP)和贝塞尔曲线法。
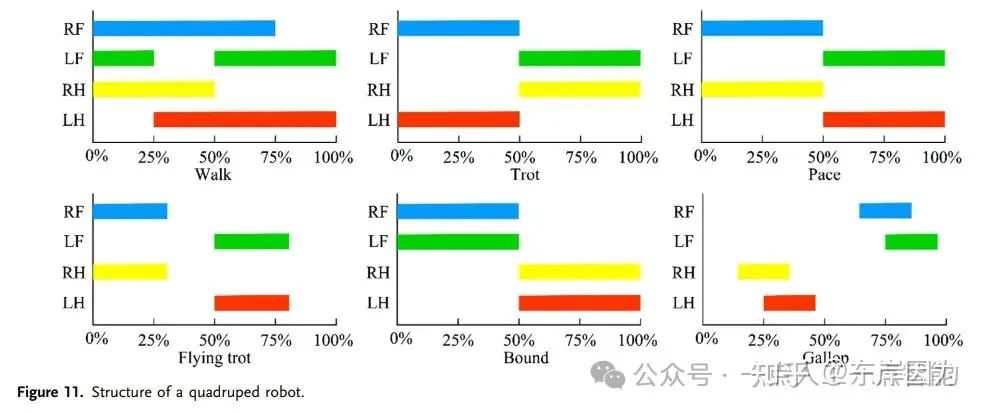
四足哺乳动物的四肢起落顺序遵循一种特定模式,称为步态。四足动物通过协调四肢动作展现出使用不同步态的能力,从而实现了更高的移动效率和在复杂地形中的出色适应性。步态可分为对称步态(如行走、小跑和跑步)[69]和不对称步态(如跳跃、腾跃和奔跑)[70]。在各种步态中,四足机器人的速度和强度各不相同,导致其姿态有显著差异。在行走步态中,任何时候都有三条腿接触地面,形成一个稳定的三角支撑结构,因此也被称作静态步态[71]。小跑步态则是一种低至中速的步态,常用于从步行向跑步过渡,以实现更快的速度。其特点是在矢状面内,四条腿按对角线模式交替移动。当速度提升时,四条腿可能都会短暂离地[72]。由于速度、稳定性和效率的优势,小跑步态和跑步步态是四足机器人常用的步态[73]。跑步步态被广泛应用于机器人运动控制中,在此步态下,左前腿与左后腿的动作同步,同样,右前腿与右后腿也保持一致。运动控制
四足机器人是一种相对复杂的欠驱动系统。为了实现全方位移动,每条腿通常需要一个用于滚动的自由度(DoF)和两个用于俯仰的自由度。这意味着四条腿共有12个主动自由度,再加上躯干的6个被动自由度,总计18个自由度。
运动控制指的是通过复杂算法调控机器人在动态运动过程中的位置和关节扭矩,旨在实现动态稳定并提高系统的整体鲁棒性。与传统固定基座的机器人不同,四足机器人在控制运动速度和姿态稳定性时,极大地依赖于脚与地面的相互作用。因此,在考虑机器人自身动力学特性的基础上,四足机器人的控制还需特别关注脚与地面的接触状况,包括接触反力和摩擦力的影响。
四足机器人的自主运动是一项关键的技术手段,它能够独立评估外部环境,并协助人类在复杂环境中完成任务。实现自主运动的核心在于路径规划和地形识别技术。