

无人机自主飞行系统的架构通常包括多个模块和组件,用于实现飞行控制、感知、决策和执行等功能。以下是一个基本的架构示例:
1. 传感器模块:
惯性测量单元(IMU):用于测量飞行器的加速度和角速度。
全球定位系统(GPS):提供位置和速度信息。
摄像头或激光雷达:用于视觉感知和障碍物检测。
2. 数据融合模块:
将来自不同传感器的数据进行融合,提高位置、速度和姿态的准确性。
飞行控制模块:
自动驾驶控制器:根据传感器数据和目标任务,生成飞行姿态和轨迹。
航向控制器:控制飞行器的方向。
高度控制器:控制飞行器的高度。
姿态控制器:控制飞行器的姿态。
决策与规划模块:
路径规划算法:根据任务和环境条件,生成安全、高效的飞行路径。
避障算法:在飞行过程中避免障碍物,并且确保飞行器遵守规定的空域限制。
执行模块:
电机控制器:控制飞行器的电机,实现姿态和位置的调整。
通信模块:与地面站或其他飞行器进行通信,接收任务指令或发送飞行状态信息。
用户界面模块:
地面站软件:用于监控和控制飞行器,设定任务和参数。
这些模块通常通过内部总线或通信接口相互连接,并在整个飞行过程中协同工作,从而实现无人机的自主飞行。具体的架构设计可能会根据无人机的类型、应用场景和性能要求而有所不同。
当涉及无人机自主飞行时,数据融合模块起着至关重要的作用。这个模块负责将来自不同传感器的数据整合在一起,以提高对飞行器位置、速度和姿态的准确性。下面是数据融合模块的具体描述:
数据接收与预处理:
数据融合模块首先接收来自各种传感器的原始数据,例如IMU、GPS、摄像头或激光雷达的数据。
对接收到的数据进行预处理,可能包括校准、滤波、坐标变换等操作,以确保数据的一致性和可用性。
特征提取与跟踪:
对于视觉传感器(如摄像头或激光雷达),数据融合模块可能会进行特征提取,例如提取环境中的地标或障碍物。
通过跟踪这些特征,可以获得有关飞行器周围环境的持续信息,并在决策和规划阶段使用。
传感器数据融合:
将来自不同传感器的数据进行融合,形成综合的飞行状态估计。这可以通过多传感器融合技术,如扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)来实现。
通过融合来自不同传感器的信息,可以弥补单个传感器的局限性,提高飞行器的位置、速度和姿态估计的精度和稳定性。
误差估计与校正:
对于融合后的飞行状态估计,数据融合模块可能会进行误差估计和校正,以进一步提高准确性。
这可能涉及估计传感器的偏差、噪声和不确定性,并将其纳入状态估计过程中进行补偿或校正。
输出与传递:
最终,数据融合模块会生成一个综合的飞行状态估计,包括飞行器的位置、速度和姿态信息。
这些估计值将被传递给飞行控制模块,用于制定飞行策略和控制指令的生成。
通过数据融合模块的作用,无人机可以更准确地理解周围环境,并更可靠地执行自主飞行任务。
飞行控制模块是无人机自主飞行系统中的关键组成部分,它包括多个控制器,这些控制器相互协作,共同实现对飞行器的精 确控制。以下是飞行控制模块中常见的控制器以及它们之间的作用关系:
自动驾驶控制器:
自动驾驶控制器是飞行控制模块的核心部分,负责根据任务需求和传感器数据生成飞行器的姿态和轨迹。
它基于飞行器的当前状态、目标状态以及环境条件,利用控制算法(如PID控制器、模型预测控制器等)计算出期望的姿态和轨迹。
自动驾驶控制器通常将期望的姿态和轨迹输出给其他控制器,如航向控制器、高度控制器和姿态控制器。
航向控制器:
航向控制器负责控制飞行器的方向,确保其按照期望的航向飞行。
它接收自动驾驶控制器生成的期望航向指令,并通过调整飞行器的方向舵或者差分推力器来实现航向的调整。
高度控制器:
高度控制器负责控制飞行器的飞行高度,确保其按照期望的高度飞行。
它接收自动驾驶控制器生成的期望高度指令,并通过调整飞行器的升降舵或者推力来实现高度的调整。
姿态控制器:
姿态控制器负责控制飞行器的姿态(如俯仰、滚转和偏航),确保其按照期望的姿态飞行。
它接收自动驾驶控制器生成的期望姿态指令,并通过调整飞行器的舵面或者推力分配来实现姿态的调整。
这些控制器之间相互协作,通过不断地接收、处理和调整控制指令,使得飞行器能够稳定地执行各种飞行任务,例如起飞、巡航、转弯、盘旋和降落。自动驾驶控制器负责生成整体的飞行控制策略,而航向、高度和姿态控制器则负责实现具体的控制动作,共同保证飞行器的安全、稳定和高效飞行。
Unmanned Aircraft System (UAS)在《无人机路 线图2005~2030》被美国国防部和FAA所采用[1],并给出了定义:指不载有操作人员、利用空气动力提供升力、可以自主飞行或遥控驾驶、可以一次使用也可回收使用、携带致命或非致命有效载荷的有动力飞行器。此定义明确了无人机的最基本内涵:1) 飞机上无驾驶人员;2) 能完成一定的使命任务;3) 能够重复使用。
无人机发展到现在,在技术上使用Unmanned Aerial Vehicle (UAV)来代表无人机,而在民间中,则经常使用drone(老式军用无人机发动机有规则的噪声与公蜂的蜂鸣相似的原因)来代表无人机
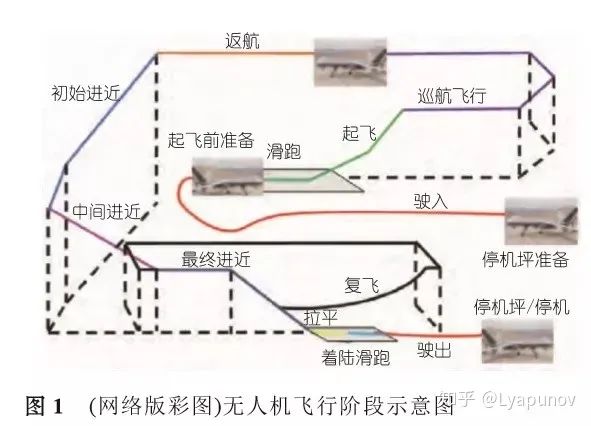
无人机的两种形式表达:unmannedaerialvehicle和uninhabitedaerialvehicle仔细探究其含义是有区别的,unmanned从字面上有两个含义: 其一是直接的含义,无人的,飞机上无人;其二是无人操纵的;而uninhabited只有飞机上无人的含义。从unmanned字面上讲,无人 机应同时具备两个含义, 即: 人不在飞机上并且人不操控飞机, 飞机能够“正常”飞行,也就是说无人机从起飞准备-滑行-起飞-空中飞行-返场着陆-退出关停的全过程(图1)都可不需要人介入。因此,用“unmanned aerialvehicle”来定义无人机是最合适的,更能体现“真” 无人机的内涵。无人作战飞机(UCAV)的英文表达应为: unmanned combat aerial vehicle。
无人机经历了 下面几个发展阶段,并形成了相应种类的无人机:
(1) 遥控飞行无人机(阶段);
(2) 遥控加局域自动飞行无人机(阶段);
(3) 全自动飞行无人机(阶段);
(4) 全自动加局域自主飞行无人机(阶段);
(5) 全自主飞行无人机阶段(下一阶段,即将来临)。
目前,国际上无人机的最 高水平是全自动加局域自主飞行无人机,根据不同的任务需求以及人力和成本的情况,依据实际情况来选择无人机的种类,这几 类无人机可以并存,相互补充,充分发挥每一种无人 机的优势。
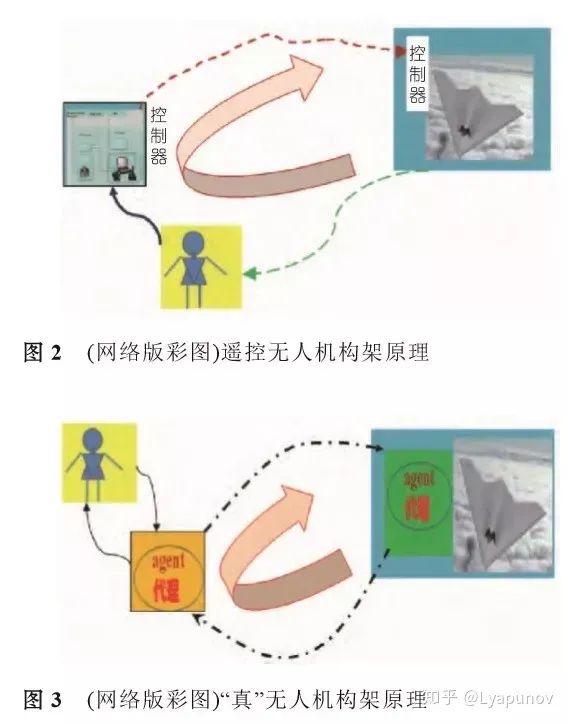
遥控飞行无人机(remotely piloted vehicle)与“真”无人机(unmanned aerial vehicle) 其内涵和本质是有区别的。遥控飞行的无人机的构架原理图见图2,“真”无人机的构架原理图见图3。从图2和3可直观看到二者的不同,遥控飞行无人机是在人直接控制下工作的,即人在其工作环中;而无 人机是在人授权下工作的,人在其工作环之外,而不是在工作环之中,这一本质上的差别就导致了二者在设计中系统结构、控制功能和实现方法的不同。
无论怎样给无人机下定义, 有自我独立工作能力应是其本质属性, 但不变的原则是: 无人机由人使用,人是无人机的“主人”,无人机必须听从人的管控,无人机自我独立工作权限自然是由人随时进行设置的,显而易见,为实现无人机的功用,无人机的结构与能力是在“制造”它时构造的。因此,标准的无人机应有3 个工作模态:自主(自动)模态、人工干预模态和人工 操纵模态。这3种模态的使用是由人(操作员)设置与选择的。人(操作员)选择模态也应综合考虑实际环境的 复杂情况, 可遵循“将在外, 君命有所不受”的原则进 行模态选择. 上面的3个工作模式的定义与含义如下: (1) 自主 (自动)模态是无人机系统的默认模式,此模式按照人制定的规则、理念、思路进行工作,管控无人机的飞 行;(2) 人工干预模态是在自主(自动)模态下,人主动 纠正自主(自动)飞行的偏差,是在默认控制基础上增 加一△增量;(3) 人工操纵模态是在控制系统出现故障而无法自主(自动)控制无人机应急条件下,由人直接操纵飞机。一般情况下,人工操纵难以保证飞机的控制效果,其原因很简单:人不在飞行现场,难以准确感知飞机的运动信息,因而也就难以准确控制飞机,无人机采用上述3个工作模态事实上也明确了“人 机权限”问题,人作为无人机的“主人”,人通过制定规则和策略管控无人机,无人机按规则和策略自主(自动)生成控制指令控制飞机的飞行;飞行中出现与人的设想不一致结果时,人可进行适度的修正;飞行出现应急情况时,人可直接操控飞机,这是“孤注一掷”的行为。


公众号 扫码咨询
 |
上海市闵行区中春路4999号莘庄商务楼1326室 |
 |
service@covond.com |
 |
www.covond.com |
 |
交换机:18017588179(孙经理) 无人机:13311882358(孙总) |