

到达角度AOA / 到达相差PDOA

AOA(Angle of Arrival)/PDOA(Phase Difference of Arrival)通过计算信号到达不同位置接收天线的相位差值来计算信号的接收方向从而确定其相对于自身的朝向。
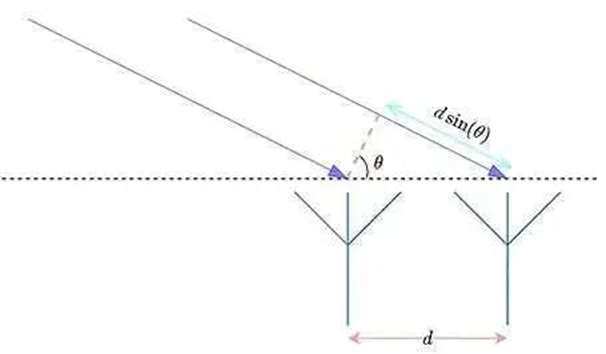
Angle of Arrival – general case

到天线A的路径比到天线B的路径大p=d.sin(θ)。如果假设信号在自由空间中传播,不受阻碍或经过变换,那么信号传播到天线A所需的时间将更长。为了计算入射角,可以找到每个天线的到达时间,以及用于估计p和θ的差值。
PDOA advantage over TDOA
UWB系统中,到达角度(AOA)可以通过经由不同天线接收到的信号之间的相位差的估计来间接地进行估计。这个基于相位差的估计来估计AOA的计数就叫做PDOA(Phase Difference of Arrival)。相比其他方案,PDoA可以提供了更高的角度精度。
考虑45 度的方位角,即θ=π/4 ,代入前文的公式(assuming the optimum antenna distance d = 2.3cm),可以得到两根天线的到达时间差(TDOA)为:

这么小的数值已经远远超出了基带接收机的时间测量精度范围了。相比之下,3*45=135 度的相位差的估计就要容易得多。事实上,PDOA 可以看作利用放大效应通过一个较容易测量的量来间接估计一个比较难以测量的量的一种手段。
PDOA 的基本原理是将到达角度θ转换为到达相位差![]() ,通过到达相位差的测量来间接地估计到达角度。从θ转换为
,通过到达相位差的测量来间接地估计到达角度。从θ转换为![]() 的放大倍数越大,则估计精度会越高。
的放大倍数越大,则估计精度会越高。
无线电信号到达天线a的时间比到达天线B的时间稍晚,因此它将遇到混频器中不同的下变频器载波相位。如果基带处理器能够计算信道的复杂冲激响应,则该冲激响应将具有不同的I/Q关系,该关系等于信号在遇到混频器并被载波下变频之前经过额外距离p而引起的相位延迟。如果载波频率很高,例如4GHz或6.5GHz,那么波长将只有几厘米,因此非常小的距离p将导致相对较大的载波相位差。


Receivers Antenna Separation
脉冲响应的相位差α和入射角θ之间的关系

绿色部分的坡度为3,而红色部分的坡度为0.6。这意味着,红色部分的相位角测量误差比绿色部分的入射角误差大5倍。
注:如果天线辐射单元之间的间距d大于λ/2,则每个相位关系都有多个可能的入射角解,因此存在歧义。
Decawave的实验表明,使用略小于λ/2的天线间距可以提高报告的角度精度,接近±90º极限。在这些实验中,当在信道5(6489.6MHz)下运行时,锚定天线间距设置为2.08,而不是2.31cm,即λ/2。在这种情况下,使用AoA=PD/1.8推导角度。
Experimental Results
使用信道5上2.08cm (anchor)(锚)的天线间距报告的典型到达角与实际到达角。在本测试中,标签天线和锚天线处于相同高度,且具有相同的天线极化。

当标签天线和锚天线处于相同高度且具有相同的天线极化时,报告的角度精度如图所示。从图可以看出,相位差和角度之间的关系不是线性的,因此正在进行天线阵列的设计工作,以便可以应用简单的曲线拟合公式。除了这种不准确的来源外,还观察到以下报告的
角度误差来源:
1:标记锚定高度:-如果标记和锚定不在同一平面上,角度不准确度会增加。这是由于:
· 随着高度的增加,真实角度会小于方位角。
· 随着高度增量的变化,天线辐射方向图也会发生变化,并可能导致相位变化。
2:标签锚定极化:-如果标签和锚定天线阵列的天线极化不同,测量的PDOA可能与预期值存在显著差异。在极端情况下例如,标签天线垂直极化,锚彼此水平,则测量的PDOA误差可能为+90°。不同的标签锚天线极化可能由以下原因引起:
§ 俯仰(如标签天线倾斜wrt至锚)
§ 滚动(如将天线正面贴在锚上,旋转wrt至锚)
§ 偏航(如标签天线旋转垂直轴wrt至锚定)
挑战性高的系统约束是由于标签锚天线极化差异导致的PDOA变化。迄今为止,使用圆极化标签天线在减少因不同天线极化而产生的PDOA变化方面取得了好的效果。
Decawave使用定制设计的标签大小的圆形极化天线和线性极化锚阵列的初步结果给出了以下结果:
· 俯仰:在整个180ºAOA范围内,从无标记俯仰到锚定天线的60º标记俯仰wrt,AOA精度为±12º。
· 滚动:在整个180ºAOA范围内,从无标签滚动到锚定天线的90º标签滚动wrt,AOA精度为±30º。
· 偏航:在整个180ºAOA范围内,从无标签偏航到锚定天线的90º标签俯仰wrt,AOA精度为±17º。
注:在实践中,由于标签的相对方向,AOA精度可通过俯仰、横滚和偏航AOA精度的组合来确定,因此上述值可能会更好或更差。
最优天线间隔λ/2:
PDOA要求两根天线靠得非常近—理想的情况是两根接收天线的间隔为波长的一半,即λ/2。
最优天线间隔是指在不产生相位模糊的前提下使得到达相位差较大化的间隔。天线间隔为最优距离时,在90度到-90度范围内,θ与α 存在一一对应的关系,在中间的线性部分的斜率大概为3左右。
当天线间隔小于最优间隔时, 的线性部分的斜率变小了,这意味着相比最优天线间隔时估计精度有损失。
当天线间隔大于最优间隔时, 的线性部分的斜率更大,但是存在相位模糊现象,即 的关系不满足一一对应关系,而是多对一关系。这样由就不能对应地确定 。这意味着对 的估计范围变小了。


详情可至微信公众号“巨视安防”了解。


公众号 扫码咨询
 |
上海市闵行区中春路4999号莘庄商务楼1326室 |
 |
service@covond.com |
 |
www.covond.com |
 |
交换机:18017588179(孙经理) 无人机:13311882358(孙总) |