无人机桥梁检测的效率分析
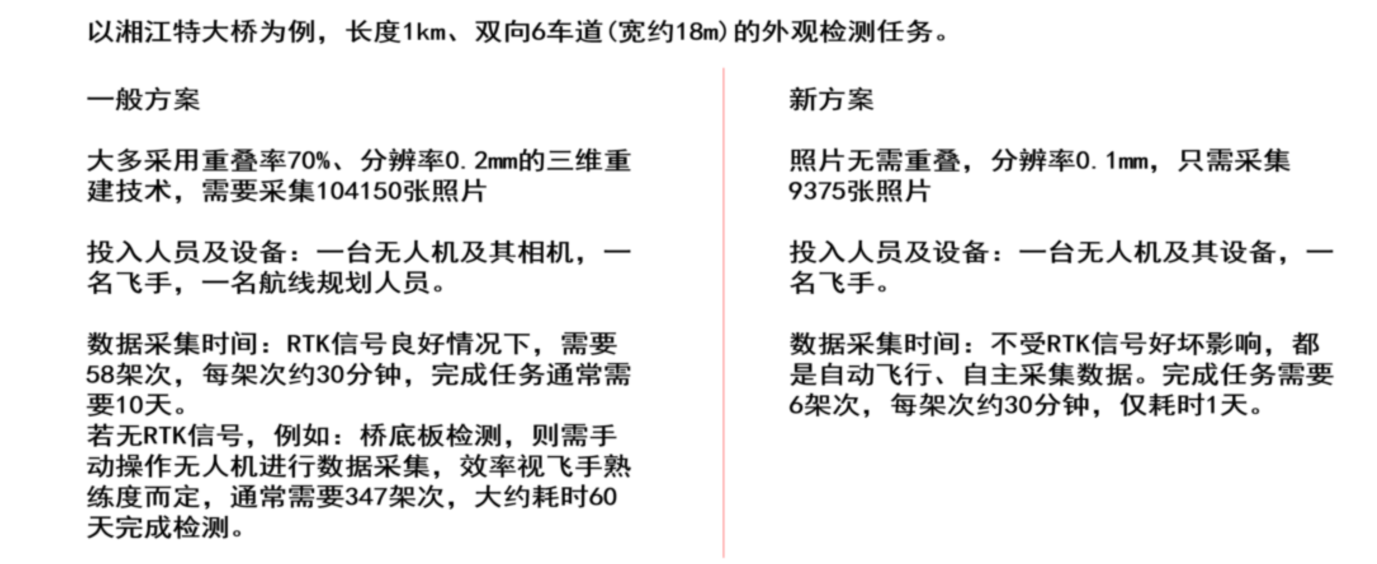
结论-并没有提升效率
需要首先对大桥建立高精度的3D建模,根据任务制定无人机的飞行路径以及动作,商用无人机续航通常仅30-40分钟,单个任务需要细分多次飞行任务(不同的起飞点及航线)
要实现大桥的3D建模以满足无人机自主飞行航线规划的需求,需要结合高精度数据采集、智能航线规划、三维重建等技术。
1. 数据采集:获取高精度桥梁数据
无人机航线规划的基础是高精度的桥梁3D模型,因此需要先进行数据采集,主要包括:
倾斜摄影:使用多旋翼无人机(如大疆M300 RTK)搭载五镜头相机,从不同角度拍摄桥梁,确保覆盖桥面、桥墩、拉索等关键部位。
激光雷达(LiDAR)扫描:适用于复杂结构(如斜拉桥、悬索桥),可穿透植被获取毫米级精度的点云数据。
红外热成像:辅助检测桥梁内部缺陷(如混凝土空洞、钢筋锈蚀)。
近景摄影测量:针对桥梁细节(如裂缝、螺栓)进行近距离拍摄,提高模型精度。
关键点:
2. 三维建模:生成高精度桥梁数字孪生
采集的数据需通过专业软件处理,生成可用于航线规划的3D模型:
关键点:
3. 航线规划:基于3D模型制定自主飞行路径
无人机航线需结合桥梁结构特点,确保全覆盖、高效率、避障安全:
(1)智能航线生成方法
泊松圆盘采样+视角优化:
对3D模型表面进行采样,生成观测点
基于可重建性规则(交会角、分辨率)优化拍摄视角
分区聚类:
(2)航线规划软件
关键点:

大桥3D建模
一、航线飞行(推荐方案)
优势:
精度保障
效率提升
标准化作业
适用场景:
桥梁整体建模(需全局覆盖)
规则结构检测(如桥面、桥墩等大面积区域)
典型案例:
杭州湾跨海大桥采用大疆M300 RTK+五镜头相机,通过自动航线完成全桥三维重建,模型精度达3mm。

一、航线规划核心要素
结构适应性规划
传感器参数优化
相机倾斜角度:
分辨率要求:
混凝土裂缝识别:≥3mm/像素
钢构件锈蚀检测:≥1mm/像素
飞行参数计算
二、KMZ文件制作规范
关键参数设置
航点属性:
必须包含高程基准(WGS84椭球高+大地高转换)
每个航点设置悬停时间(裂缝检测点建议2-3s)
样式规范:
不同检测区域使用颜色编码
航点图标区分拍摄类型(红圈=垂直/蓝三角=倾斜)
特殊区域标记
禁飞区:使用多边形围栏(透明度50%红色填充)
重点检测区:黄色高亮显示+200%图标放大
三、典型参数配置表
五、质量验证流程
覆盖度检查
精度验证
KMZ验证清单
坐标系一致性检查
航点高程逻辑校验
禁飞区冲突检测
传感器参数匹配验证
六、工程应用建议
大型桥梁分级规划
将跨海大桥按跨径划分为若干检测单元
每个单元独立生成KMZ子文件
动态更新机制
每次检测后更新:
历史航线版本管理(建议保留最近5次)
通过以上标准化流程,可确保桥梁检测航线的安全性、完整性和可重复性。实际作业时应结合具体桥梁的BIM模型进行仿真验证,推荐使用Pix4Dmatic进行航线预演。

在桥梁检测的无人机航测中,布设地面控制点(Ground Control Points, GCPs)是确保三维建模精度的关键技术环节。
一、地面控制点解决的核心问题
绝对精度控制
几何变形校正
多期数据对齐
实现不同时期检测数据的毫米级匹配(用于变形监测)
解决无纹理区域的匹配难题(如钢箱梁光滑表面)
传感器标定验证
校验激光雷达点云与光学影像的配准精度
评估多源数据融合质量
二、技术路线实施步骤
(1)控制点布设方案设计
(2)控制点制作标准
材质选择:
混凝土桥面:嵌入式不锈钢标志点(直径30cm)
钢桥面:磁性靶标(带十字刻划)
临时点:高反差喷漆图案(L形或十字形)
尺寸规范:
(3)测量实施
测量设备:
采用0.5"级全站仪(如Leica TS60)
GNSS接收机(平面5mm+高程10mm精度)
观测要求:
全站仪至少3测回观测
GNSS静态观测≥30分钟(PDOP<3)
(4)数据处理
平差计算:
平面≤3mm
高程≤5mm
使用TBC软件进行三维约束平差
三、常见问题对策
通过科学布设地面控制点,可将桥梁三维模型的绝对精度控制在1-3cm级,满足《公路桥梁养护规范》(JTG 5120-2021)对结构变形监测的精度要求。未来随着SLAM技术和GNSS/INS紧组合的发展,控制点数量可逐步减少,但关键部位仍需保留基准控制。