
具身智能是指通过物理身体与环境的交互实现智能行为的系统,强调感知、决策、行动一体化,而非依赖纯符号化推理。其核心在于智能体需具备本体(物理载体)与智能体(决策核心)的耦合,并通过实时交互学习适应环境。具身智能需在真实或虚拟世界中“身体力行”完成任务。
1. 本体(物理载体)
l形态多样:涵盖人形机器人、四足机器人、工业机器人、无人机等,需具备环境感知、运动和执行能力。
l人形机器人被认为是终 极形态,因其更接近人类行为模式,便于复杂任务泛化。
2. 智能体(决策核心)
l依赖大语言模型(LLM)、视觉语言模型(VLM)等技术,赋予机器人自然语言交互、多模态感知和任务分解能力。
l需解决复杂环境下的3D感知、多级语义推理、长期记忆等挑战。
3. 学习与进化机制
l通过仿真环境加速训练,结合真实环境迁移优化决策。
1. 数据与泛化能力
l现实场景复杂多变,高质量数据稀缺,需结合仿真与真实交互生成动态数据。
l大模型(如RT系列)通过端到端训练提升泛化,但需解决算力与实时性矛盾。
2. 多模态融合与交互
l需整合视觉、语言、动作等多模态信号,如CLIP模型统一视觉与文本表征。
3. 技术路线分歧
l开源与闭源之争:开源可加速生态构建(如DeepSeek模式),但需平衡核心技术与商业化。
1. 典型应用
l服务机器人:客服、家庭服务机器人,通过自然语言交互执行任务。
l工业场景:自适应高精度操作,如智元机器人灵犀X1实现开源硬件与软件协同。
l人机协作:如特斯拉Optimus执行精细动作,需结合预训练技能与大模型规划。
2. 国内发展动态
l上海徐汇区推出政策支持具身智能研发,单项目最 高资助1000万元,并成立产业联盟。
l智元机器人推出全球首款全栈开源人形机器人灵犀X1,推动“人人可造”生态。
1. 技术融合
l大模型与机器人深度结合(如RT-H分层决策),需解决语义到物理动作的精准映射。
2. 伦理与标准化
l需建立统一技术路线与行业标准,避免重复投入与生态碎片化。
3. 商业化落地
l当前人形机器人仍处早期,应用效率低于人类,需突破成本与性能瓶颈。
总结
具身智能正从实验室走向产业,其发展依赖跨学科技术突破与开源生态共建。中国在硬件制造与场景资源上具备优势,但需解决核心算法、数据闭环与商业化路径问题。未来十年或成为继智能手机后的万亿级市场。

空天具身智能(Aerospace Embodied Intelligence)旨在赋能无人机、卫星等空天平台实现自主感知、认知、行动端到端闭环,具备以自我为中心主动与人类和环境交互的能力。空天具身大模型是实现无人机自主智能的有效手段,也是通往空天具身智能的必经之路。构造无人机智能体数据集主要存在以下几个挑战:
无人机具身任务缺乏统一定义:无人机智能体需要在场景随机和环境局部可观测条件下理解四维时空的内在关联并做出准确的行动,涉及感知、认知、规划、决策等多个层面。任务多样且相互耦合,导致空天智能体的任务定义至今仍不清晰。
无人机3D数据采集难:采集户外环境3D数据需要无人机等设备,门槛较高,并且户外3D数据采集需要专业人员操控无人机在更广的范围中采集更多的点云数据。
无人机具身数据标注成本高:无人机智能体的动作空间多,需要对标注人员进行长期的培训才能完成对无人机智能体的熟练标注。

空天具身智能领域的应用主要包括以下方面:
无人机自主导航与控制:提高无人机在复杂城市环境中的自主导航、避障和任务执行能力。
卫星遥感与智能解析:空天具身智能技术可应用于卫星遥感图像的智能解析,提高卫星对地观测数据的处理和分析能力。
空中交通管理:利用无人机具身智能技术,实现空中交通的自主管理,提高空中交通系统的安全性和效率。
灾害监测与救援:无人机智能体可应用于灾害现场的快速侦查、监测和救援任务,提高救援效率。
城市规划与管理:通过无人机智能体收集的城市空间数据,为城市规划、建设和管理工作提供有力支持。
环境保护与监测:利用无人机智能体对环境进行实时监测,及时发现和处理环境污染问题。
军事领域:空天具身智能技术可应用于军事侦察、目标识别、战场态势感知等方面,提高军事作战能力
SkyAgent-Models:空天智能体模型
空天具身场景感知:二维视觉语言模型的视觉模型仅能接收图片,无法接收环境特征,因此在测试该任务时对二维视觉语言模型进行调整,将输入改为无人机位置前后左右所拍摄的四张图片,通过描述图片的prompt生成各自的caption之后,对四个caption进行拼接,得到输出的环境观察信息。
空天具身空间推理:该任务同样需要输入三维特征,因此在测试该任务时对二维视觉语言模型进行调整,将输入改为无人机位置正前方的观察图像与问题,通过对该图像进行推理问答,得到空间推理答案。
空天具身导航探索:将输入改为无人机飞行路径上的几张图片和问题,通过生成各自图像的caption之后,根据拼接后的caption回答问题,最终得到无人机导航探索的答案。
空天具身任务规划:首先通过对终点图片生成caption并设计问题,即询问无人机智能体怎么到达该地点。然后,依据拼接后的飞行路径图片caption进行解答,得到无人机路径规划的答案。

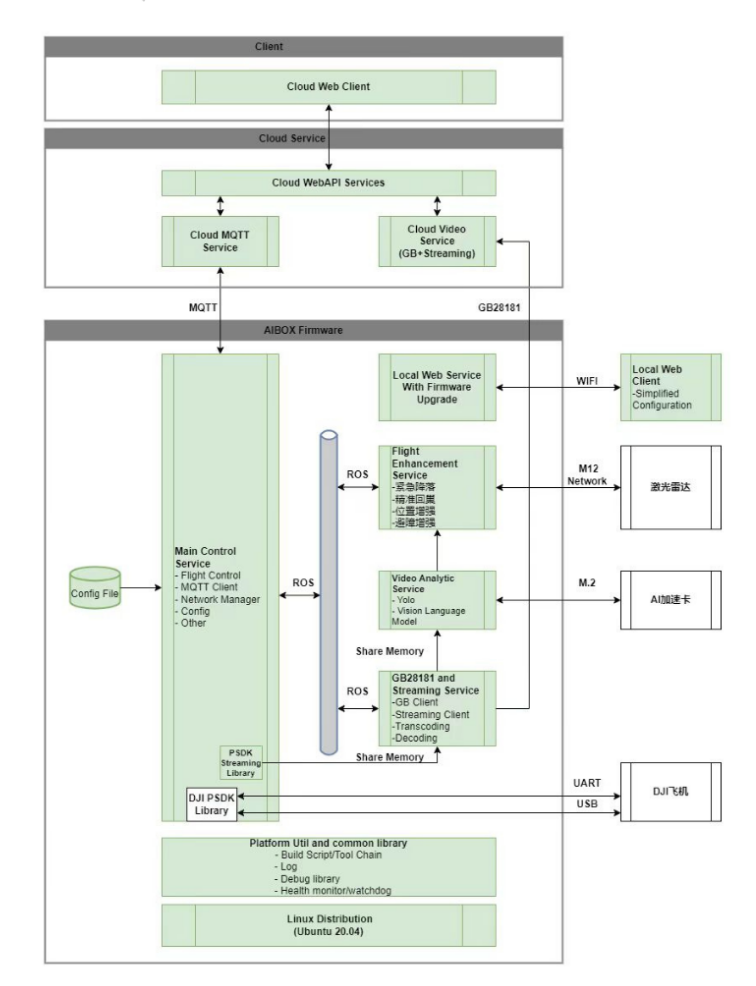
易和联航&具身智能体AIBOX

公司愿景:
以通信、定位、导航、识别、控制(CLNRC)五大智能体核心能力为技术底座,通过具身智能理论构建智能体物理存在与数字认知的深度融合,让智能系统不仅拥有环境感知的大脑,更具备与环境共融的"身体"。结合人工智能与自动驾驶技术的深度耦合,打造具有物理具身性、环境交互性和认知涌现性的跨设备(无人机/机械臂/机器狗/无人艇)、跨介质(陆地/空中/水域)、跨场景的自主决策系统,致力于成为无人化垂直场景的智能基础设施构建者。
让智能体突破人类操作的物理边疆
通过构建空间智能时代的具身智能载体:"手"(机械臂)、"足"(机器狗)、"翼"(无人机)、"鳍"(无人艇),我们正在重新定义生产力工具的边界。每个智能体通过多模态传感器形成"数字躯体",在真实物理环境中实现感知-决策-执行的具身闭环,让危险场景无人值守,让精密操作无限重复,让人类专注更具创造力的价值领域。
核心技术与产品布局
公司聚焦定位、导航、边缘视觉大模型等核心技术,推出AiBox系列产品,涵盖通信增强、安全增强、算力增强等功能,满足不同无人化场景需求。


公众号 扫码咨询
 |
上海市闵行区中春路4999号莘庄商务楼1326室 |
 |
service@covond.com |
 |
www.covond.com |
 |
交换机:18017588179(孙经理) 无人机:13311882358(孙总) |