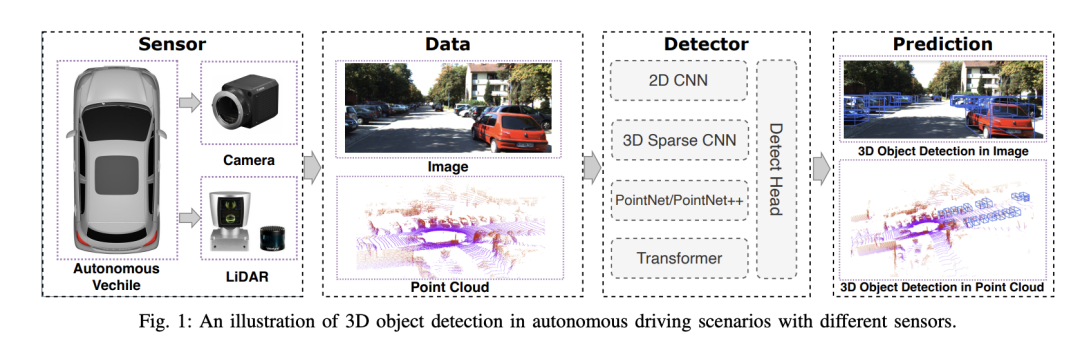
单传感器存在采集数据信息不完整的缺点,比如激光雷达缺乏纹理色彩信息,相机缺乏深度信息。激光雷达和相机数据融合可实现传感器之间信息互补,感知空间精准的彩色三维数据,被广泛应用于自动驾驶、移动机器人等领域。近年来,智能化成为各行业趋势,单一传感器采集的数据不能准确描述环境数据信息。多模态传感器融合技术的发展弥补了单一传感器的缺点,实现不同传感器的数据互补,被广泛应用于遥感感知、机器人技术、自动驾驶、三维空间信息重建等领域。不同传感器的应用领域各不相同,联合使用这些传感器可获得更丰富的数据信息。一、激光雷达:
(1)通过发射光束测量目标到激光雷达接收器的距离,得到精确的三维点云数据,被应用于障碍检测、实时地图构建、自助导航等领域
(2)激光雷达采集的点云数据精度高、抗干扰性好,不受光照变化影响,有准确的深度信息,但缺乏色彩和纹理信息。
二、相机:
(1)作为最常见的传感器,通过拍照采集目标图像提供丰富的视觉信息,被广泛用于目标检测、场景理解等领域,
(2)但相机缺乏深度信息且稳定性差,易受光照、天气影响。
激光雷达和相机数据融合可实现两传感器信息互补,得到更丰富的三维环境信息,被广泛用于遥感测量、自动驾驶、机器人技术等领域
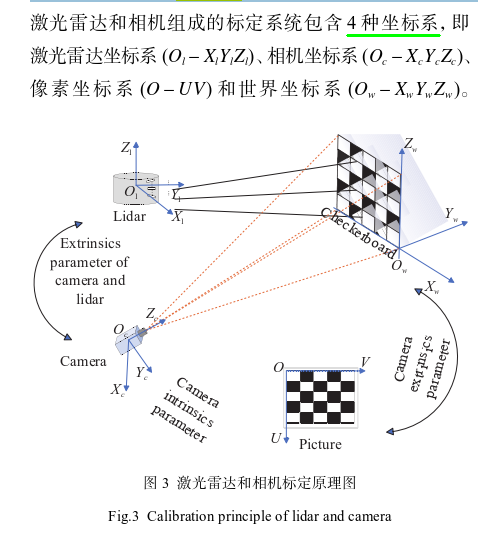
多源数据信息融合的首要步骤是传感器间精确稳定的外部校准,找到合适的变换矩阵,实现激光雷达和相机两坐标系数据点间的相互转化。内参主要描述传感器内部信息的映射关系,例如相机的焦距、主点坐标、畸变参数及激光雷达的角度偏差、距离偏差,激光雷达与相机联合标定原理
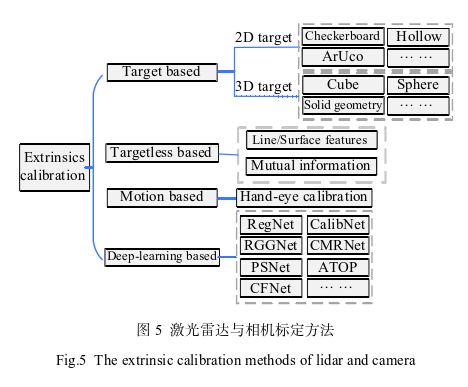
激光雷达和相机外参标定
激光雷达和相机位姿配准是三维离散点和二维连续点的复杂性匹配问题,是当前自动驾驶、移动机器人技术、三维空间重建等领域研究的重点。为准确分析激光雷达和相机外参标定研究成果,本章节从基于标靶标定、基于无标靶标定、基于运动标定和基于深度学习标定四方面对现有研究成果归纳总结,如图5所示。
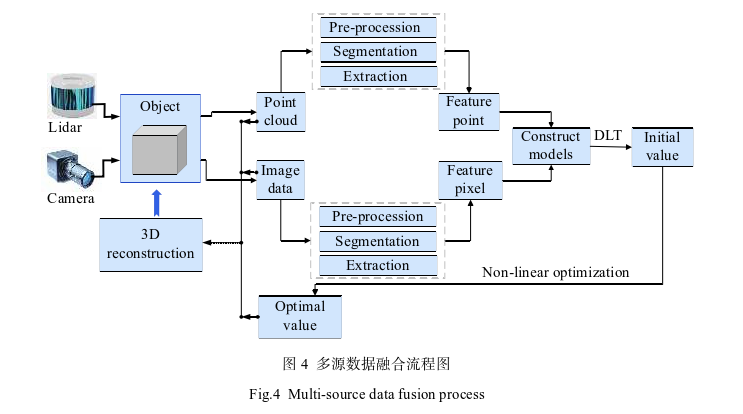
点云处理
实际工程案例中,激光雷达采集的点云会由于设备、环境等因素影响分布杂乱并呈现噪声。为准确获取与图像对应的同名数据,需要对点云处理。点云处理方法包括:预处理、分割、特征提取等。
预处理
包括滤波、精简、分割等,目的是排除干扰、平滑点云、精简点云。为得到最佳效果,预处理的顺序可以调整或反复叠加。滤波具有排除干扰和提取特征的功能,常见滤波方法有:高斯滤波、直通滤波、条件滤波等。点云分割
获取与图像重合的特征区域,常见的分割方法有:点云几何属性(如点距离、法线方向和曲率等、聚类分割(K均值聚类、密度聚类和均值漂移聚类等)、颜色特征(RGB值和颜色直方图)、深度学习(卷积神经网络、图卷积神经网络等模型)、形状特征(向量场直方图)。特征提取
是对分割后区域提取与图像对应的同名特征。点云特征提取可分两种形式进行:第一种是直接特征提取,利用体素网格、关键点检测、法线和点云估计等方法提取特征;第二种是间接特征提取,将点云数据转换成深度图和距离图,利用图像处理的方法提取特征。
图像处理
相机采集的图片也需要处理得到与点云对应的同名特征,处理方法有:滤波、分割、特征提取等
滤波
具有去除图像噪音,增强特征细节作用,常见图像滤波有均值滤波、中值滤波和高斯滤波等。- 图像分割是寻找和点云对应的同名特征所在区域,常见分割方法有:阈值分割、边缘检测(Sobel算子,Canny算子)、区域生长、分水岭算法等。
- 图像特征包括边缘特征、角点检测和纹理特征等,提取特征时需要图像灰度转换和图片增强等处理。
基于激光雷达-相机融合的3D多模态目标检测技术结合了激光雷达的高精度深度信息和相机的丰富语义信息,在自动驾驶、机器人导航、智慧城市等多个领域具有广泛应用。以下是其主要应用场景及技术特点:1. 自动驾驶
(1)环境感知与目标检测
高精度3D目标检测:激光雷达提供精确的点云数据,相机补充RGB信息,可准确检测车辆、行人、自行车等目标的3D位置、大小和类别(如DeepFusion模型在Waymo数据集上显著提升行人检测精度)。
远距离目标识别:激光雷达在远距离探测中可能稀疏,但结合相机语义信息(如BEVFusion框架),可提高远距离目标的检测能力。
复杂天气适应性:激光雷达在雨雾天气仍能提供稳定数据,而相机在光照变化下可能失效,多模态融合提高系统鲁棒性。
(2)动态避障与路径规划
2. 机器人导航与工业自动化
(1)AGV/AMR(自动导引车/自主移动机器人)
(2)无人机巡检
3. 轨道交通与智能铁路
未来,随着多模态对齐算法(如DeepFusion、BEVFusion)和轻量化计算架构的优化,该技术将进一步推动智能系统的可靠性和普及度