Occupancy 算法的来源
特斯拉的Occupancy算法是该公司自动驾驶系统(FSD,Full Self-Driving)中的一个关键组件,旨在提高车辆对周围环境的理解和建模能力。
基于激光点云的Occupancy算法在周围障碍物感知中的原理涉及多个步骤,结合了三维数据处理、概率建模及深度学习技术。以下是其核心原理的详细分步解释:
1. 激光点云数据获取与预处理
2. 构建三维Occupancy Grid
3. 占用概率计算
4. 动态障碍物处理
5. 后处理与障碍物提取
聚类分析:对占用体素进行聚类(如DBSCAN、欧氏聚类),形成独立障碍物区域。
边界框生成:拟合障碍物的3D边界框,估计尺寸和朝向。
可行驶区域分割:结合地面分割结果,提取安全通行区域。
6. 多传感器融合(可选)
关键挑战与解决方案
稀疏点云处理:使用深度学习补全点云(如PU-Net)或概率模型推断遮挡区域。
实时性优化:采用稀疏体素表示和GPU加速,降低计算负载。
动态环境建模:引入时序建模和运动预测,区分静态与动态障碍物。
应用场景
总结
基于激光点云的Occupancy算法通过几何建模或深度学习将稀疏点云转换为稠密3D占用网格,结合时序与多传感器数据,实现对周围障碍物的精确感知。其核心在于高效处理三维数据、动态更新占用状态,并提取可解释的障碍物信息,为自动驾驶系统提供关键环境理解能力。
从可达空间(Drivable Space)到占据网络(Occupancy Network)
Occupancy算法

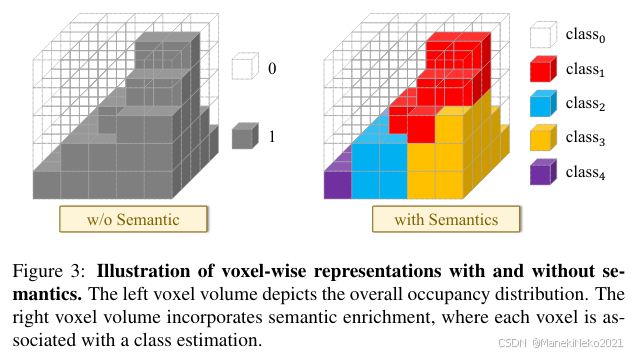
Occupancy是一种三维表示,它将环境或者一个连续的物体划分为一系列的立方体(或称为体素,voxels),并为每个体素分配一个值表示该体素是否被物体占据(该部分是属于物体点或者非物体点),可以是0/1二元表示,也可以是[0, 1]之间的一个概率值,对应下图左边部分;同时每个占用的体素还能带有语义信息,即对应的类别预测,对应下图右边部分。
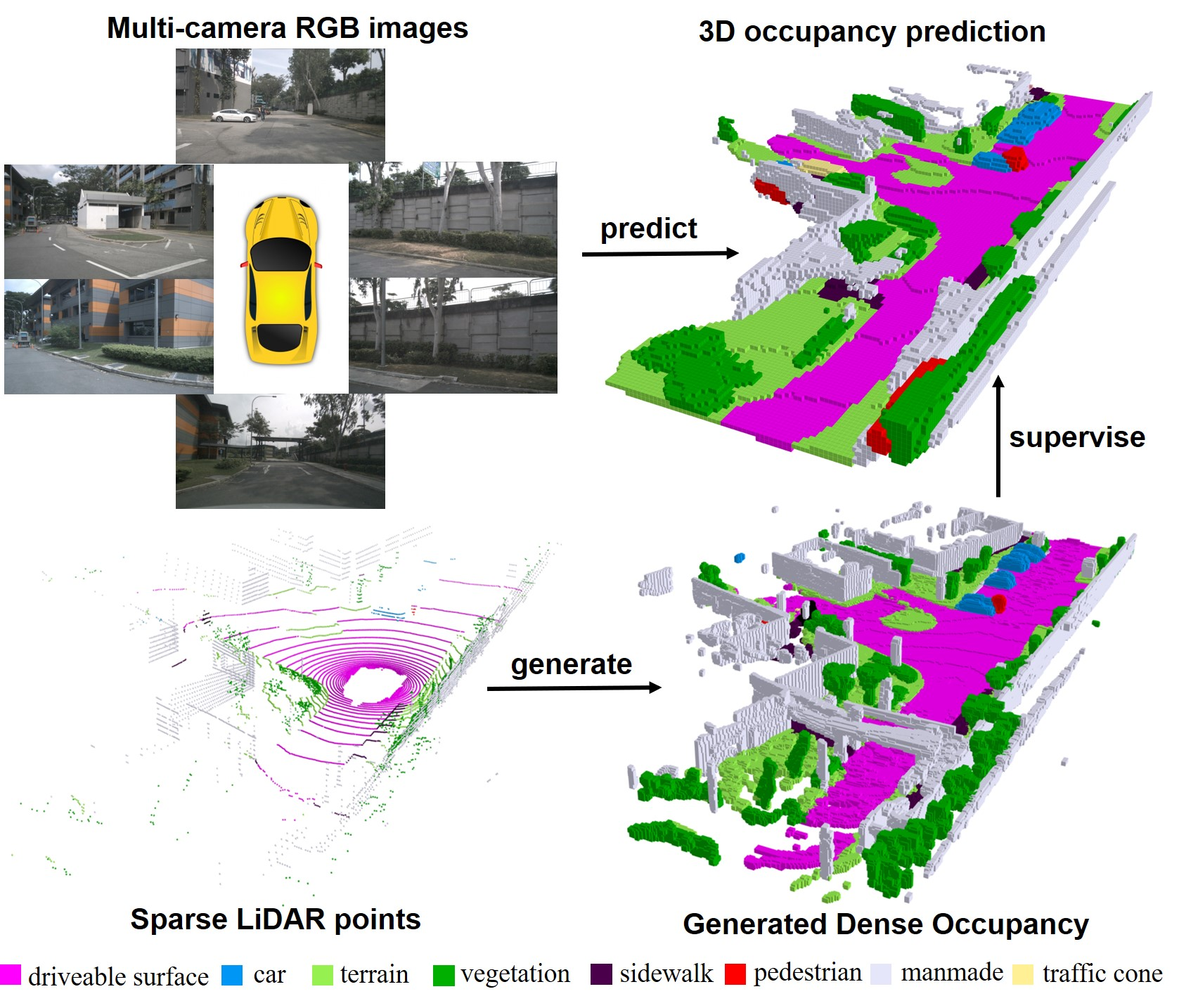
Occupancy模型一般步骤:
特征提取:使用不同的网络结构从图像或其他传感器数据中提取特征
体素化表示:使用attention、反卷积等生成3D体素网格(或类似NeRF的3D重建技术)
占用预测:基于提取的特征,预测每个体素是否被占用
后处理:对网格进行简化、细化、平滑或其他处理,以优化占用预测结果
优点:
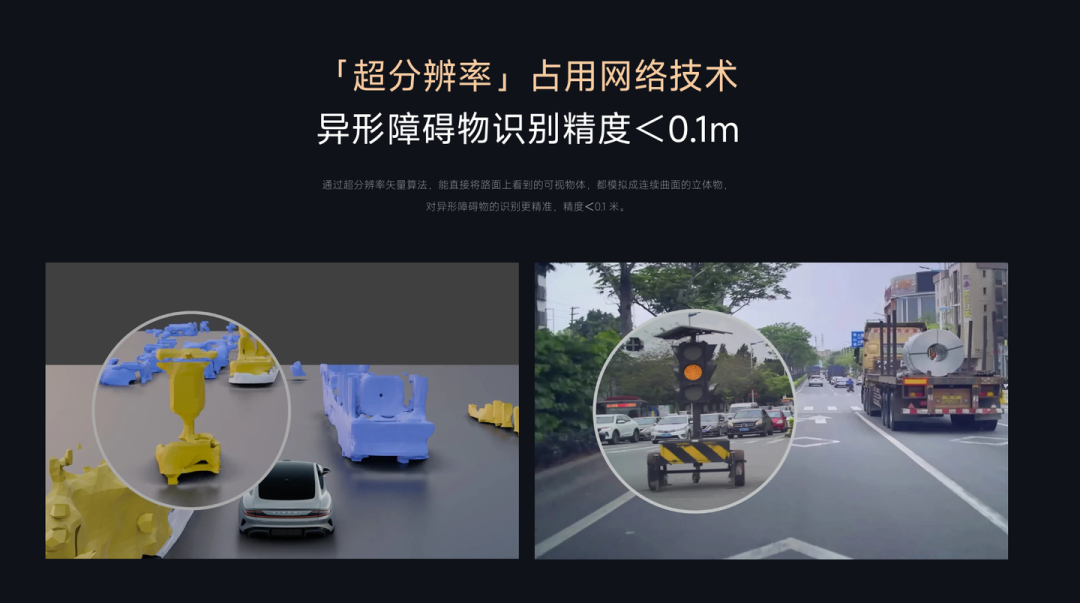
更丰富的几何信息:3d的表示,更精确描述物体位置和形状(如悬空物体)、能处理未知类别物体(占用栅格则存在物体)
易用于各种下游任务:可以用于3D检测和分割,或者灵活地转为BoundingBox、Freespace可行驶区域等形式
缺点:
计算复杂度:三维表示计算密集度更高,占用网格的存储和处理需要更多的计算资源
GT难制作:训练需要大量的三维标注数据(空间、时序),数据的获取和标注非常耗时且昂贵







